








公众号/将门创投
From: TechCrunch等 编译: Ace
Facebook最近公布了三组机器人,姑且就叫它们六足大昆虫、好奇宝宝、摸象的盲人好了。刚得知这个消息时我“门”还是有点奇怪的,这些在现实世界中真实存在的机器人,跟优化我们在虚拟网络世界上冲浪有何关系呢?一个好好的社交媒体巨头为什么花大手笔来这儿“瞎掺和”呢?
机器人对于Facebook虽说是个全新的研发领域,但它对于AI的依赖和开发早已被人熟知。AI和机器人一直以来都有很大的学科及应用重合,AI的应用不可避免会涉及到机器人的设计,而机器人的开发也一定会用到AI技术。所以Facebook会涉足机器人领域从根本上来说不足为怪。通过开发真实世界的机器人,相信某些背后的原理和逻辑会帮助Facebook收获更多洞见,并将其拓展到AI在虚拟社交网络的应用。
下面我“门”就来一一看下六足大昆虫、好奇宝宝、摸象的盲人到底是什么,运用了哪些技术,以及有哪些与Facebook主营业务殊途同归的结合点。
六足机器人Daisy:通过强化学习学会自主行走

走路在机器人的世界中并不像人类“迈开腿”这么简单,尤其是有六只腿的时候,什么时候哪只腿该落地,每条腿的作用是什么,相互之间该如何配合都会成为难题。尽管可以通过一系列的程序设定使机器人完成向前走、转弯、倒退等动作,但是通过编程而非学习来实现这些特定的动作在Facebook研究人员看来有点“作弊”。
就像学生,总不能永远靠死记硬背的知识来应对所有的考试,机器人也是如此,最终我们希望它能够拥有自主学习的能力。基于这样的认识,Facebook的研究团队致力于让“六足大昆虫”自己教自己走路。

好了说正经的,这只六足大昆虫也值得拥有自己的姓名——它叫Daisy
为了突破机器独立学习的极限,Facebook正在开发基于模型的强化学习方法,使Daisy在没有特定任务的培训、缺乏对周边环境的了解的情况下,能够自己学会走路。Facebook团队只赋予了Daisy几个基本的信息,比如向前走、做对了动作会给出相应奖励等,但是并没告诉它应该先迈哪条腿。接下来团队让它自己慢慢走、尝试不同的动作,从经验中吸取教训并不断修正自己的模型。这种做法的目标是希望能够缩短机器人从零开始到掌握动作的时间,从数周减少到几小时。
🤔这能做啥?
Facebook拥有海量的、复杂的、甚至不确定的数据。处理数据和训练机器人看起来好像不太相关,但两者的相同点是在短时间内训练一个“系统”,有一些基本的原则和目标是差不多的。
在训练机器人Daisy的过程当中会涉及到如何通过自主学习来处理一些突发性难题,而其中的某些问题在现实和虚拟世界中有着相似的逻辑和解决方案。如何清理出其不意的路面障碍?如何消除一些奇怪的数据囤积习惯?Tech Crunch指出,也许下次Facebook需要监控某个人道主义危机的时候,系统能够利用在Daisy身上试验过的高效的自主学习模型而在早期作出反应。
巧妙利用好奇心
人人都听过“好奇心还害死猫”,但好奇心却经常成为我们提高自我学习效率的一大自我驱动力。Facebook与纽约大学合作开发的AI系统,旨在提高机器人对现实世界的理解。
Facebook运用好奇的概念让一只机械臂完成一系列不同的、但是比较寻常的任务。在这种情境下,好奇意味着机械臂被赋予了一种要减少不确定性的动机,使其提高完成任务的速度。
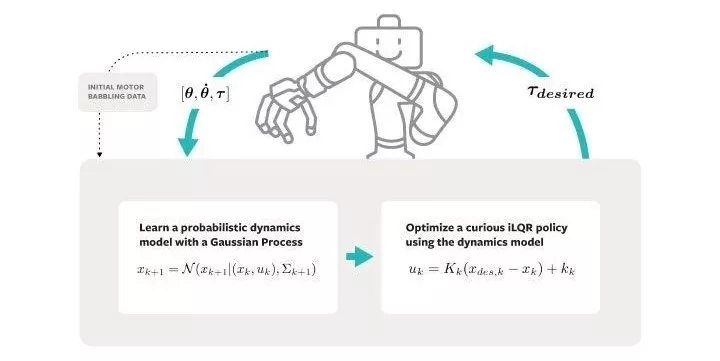
这些任务多种多样,比如轻微调整摄像头的位置以更好对物体进行识别,从而提高它在物体识别上的“自信度”和准确率。如何实现呢?打个比方,这个摄像头首先选定一个目标区域,再三确定角度是否合适,保证视野开阔。无论在哪种具体的情境下,赋予AI一定的自由来确定自己的行为,提高它对于其行为的自信,最终会使其在更短的时间内完成任务,即使在最初它可能会被某些好奇的行为所拖累。

🤔这能做啥?
Facebook在计算机视觉上已经有一定的突破,比如Portal(专注于视频聊天的智能显示器)能够追踪用户在房间里的行为,根据行为来调整屏幕上显示的内容。了解周围的环境对于类似于Portal的智能硬件,以及任何其他需要关于它们正在看到或感知的内容以便运行的其他应用程序至关重要。

Portal的特点是时刻都在分析它所识别看到的图像以获取可用信息,并进一步调整自身行为。当人脸进入到其“视线”中时,十几种新算法同时启动并开始工作。如果有人举起一个物品,这些算法开始识别它有文字吗?是否需要翻译?有可识别的QR码吗?背景怎么样?距离远近?
人们偶尔会原谅算法处理过程中屏幕上出现的“马上就好、稍等一下”,但是经常出现也不是办法。如果AI可以利用前面提到的好奇,每当遇到这种情况时能够感知到有很多的不确定性,将会提高系统的处理速度。
盲人摸象 Seeing by touching
尽管视觉很重要,但这并不是我们和AI感知世界的唯一方式。在盲人的世界中,用触觉而非视觉来感知周围的世界或具体的事物是非常普遍的。很多机器人都被赋予了对于动作、声音等的感知能力,但是实实在在的触摸感测却比较罕见。但当物体被遮挡时,触摸便成为非常重要的感测环节。
Facebook的研究团队想尝试探索一下用触觉数据代替视觉数据的可能性,与UC Berkeley的研究人员开发了一种新的触摸学习方法,通过自我监督学习实现新目标,无需任务专用培训数据。根据“视频”而不是实际的视频数据来决定采取什么行动,为其提供高分辨率的触摸数据。
使用该视频预测模型,机器人能够完成一系列复杂的触觉任务:滚动球,移动操纵杆,以及识别20面模具的某一个侧面。该模型的成功表明了使用视频预测模型也能够创建系统模型,这些系统可以了解环境对触摸的反应。
🤔这能做啥?
虽说是触觉,但实际上讨论的是跨模态应用学习。
想象一下当你第一次闭着眼睛用触摸的方式感知两个完全不同的物品时,好像并不困难。因为当你认知某种物品的时候,收获的认识不仅仅是它的外观,更是一个包含各种感官、多种方面的模型。
同理,AI可能需要将其学习的对象从一个域转移到另一个域,比如听觉数据告诉握把传感器抓住一个物体的难易程度,或者视觉数据告诉麦克风如何分离不同的声音。能够利用数据而不囿于其类型对于可靠地理解和与现实交互是非常重要的。
Facebook本次的发布看似是开辟了全新的研究领域,但是也应该认识到其志不止于此。在AI博客中写道:
我们希望通过这次研究能够创造出更有能力的机器人,更重要的是不断地推进AI在未来几年发展的边界。如果我们希望让机器能够学会思考和计划、理解人类的行为方式,我们就需要去创造一些能够自主学习的AI,它们能够在各种各样的现实情境中不断改进自己的模型,而不仅仅是在虚拟的世界。
Facebook的野心远不止开发出三款机器人,其本质还是围绕着AI,不论是继续巩固它在社交媒体上的龙头地位,还是更希望能够影响人们的线下生活。
Ref:
https://techcrunch.com/2019/05/20/why-is-facebook-doing-robotics-research/
https://ai.facebook.com/blog/advancing-ai-by-teaching-robots-to-learn/

 友情链接
友情链接