















对移动式工作的机器人来说,如何判断周边环境的安全,以保证畅通无阻是非常重要的。还没动两步就“咣咣”碰壁,这样的机器人就太尴尬了。
人工智能先驱、贝叶斯网络之父、美国计算机科学家 Judea Pearl 在最近的一篇论文中解释了基于数据统计的机器学习系统的一些局限性。
Facebook 依靠庞大的后端系统,每天为数十亿人提供服务。在这些后端系统中,许多都有大量的内部参数。

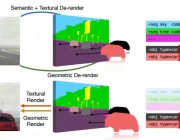
MIT 和清华大学的研究者提出目标几何、外观和姿态的分解表征架构,并将其整合到深度生成模型中,实现了对 2D 图像目标的 3D 操控。




公众号/脑极体 今天哪家科技企业在做城市智能?答案是:每一家。 今天哪家科技企业在押注无人驾驶?答案是:有钱的 […]

从有一些有趣的用例看,我们似乎完全可以将 CNN 和 RNN/LSTM 结合使用。许多研究者目前正致力于此项研究。










 友情链接
友情链接