








公众号/自动驾驶干货铺
文/陈光
前言
在上一次分享中,我对无人驾驶汽车上的激光雷达的原理、数据及功能做了介绍。
激光雷达的普及所遇到的最大挑战是:成本过高。单独一个雷达的价格可能就超过了普通小汽车的价格,因此现阶段还没有大规模量产的可能性。
为了推进自动驾驶技术的发展,同时要解决摄像机测距、测速不够精确的问题。工程师们选择了性价比更高的毫米波雷达作为测距和测速的传感器。毫米波雷达不仅拥有成本适中的有点,而且能够完美处理激光雷达所处理不了的沙尘天气。
下图为百度Apollo 2.0中所使用的毫米波雷达——Continental的ARS-408,它被安装在汽车保险杠的正中间,面向汽车的前进方向。

正文
毫米波雷达的分类
频率在10GHz~200GHz的电磁波,由于其波长在毫米量级,因此处于该频率范围的电磁波也被工程师们称为毫米波。
应用在自动驾驶领域的毫米波雷达主要有3个频段,分别是24GHz,77GHz和79GHz。不同频段的毫米波雷达有着不同的性能和成本。
以Audi A8的传感器布局为例,讲解不同频段毫米波雷达的功能。
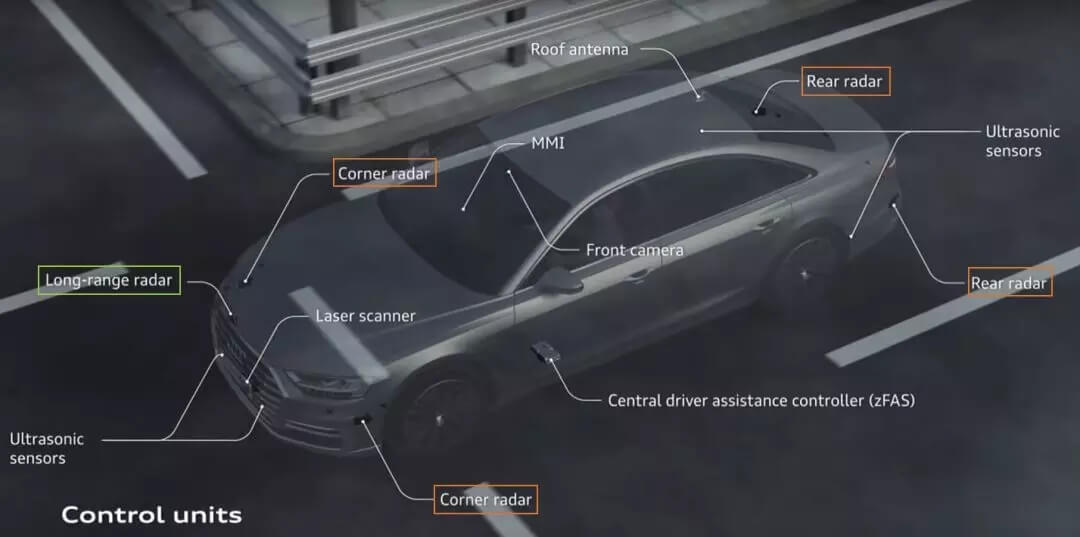
短距离雷达:24GHz频段
如上图所示被标注了橙色框的Corner radar和Rear radar,就是频段在24GHz左右的雷达。
处在该频段上的雷达的检测距离有限,因此常用于检测近处的障碍物(车辆)。图中的这4个角雷达,能够实现的ADAS功能有盲点检测、变道辅助等;在自动驾驶系统中常用于感知车辆近处的障碍物,为换道决策提供感知信息。
长距离雷达:77GHz频段
如上图所示,被标注为绿色框的Long-range radar,即为频段在77GHz左右的雷达。性能良好的77GHz雷达的最大检测距离可以达到160米以上,因此常被安装在前保险杠上,正对汽车的行驶方向。
如下图右下角的棕色区域,为特斯拉AutoPilot 2.0中所配备的长距离毫米波雷达,及其感知范围。
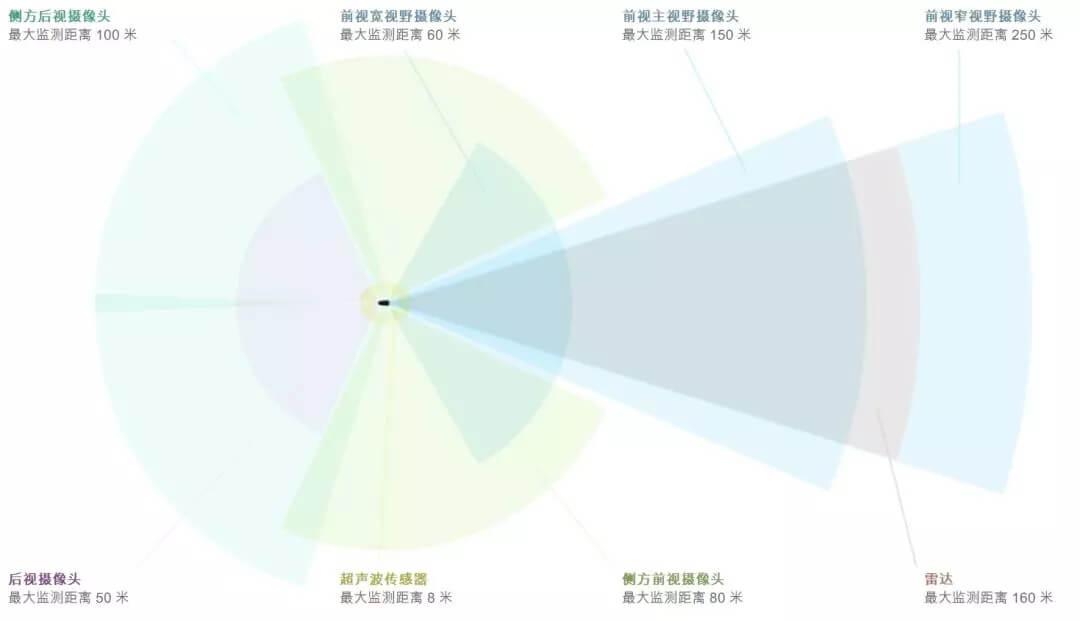
长距离雷达能够用于实现紧急制动、高速公路跟车等ADAS功能;同时也能满足自动驾驶领域,对障碍物距离、速度和角度的测量需求。
长距离雷达:79GHz频段
该频段的传感器能够实现的功能和77GHz一样,也是用于长距离的测量。
根据公式:光速 = 波长 * 频率,频率更高的毫米波雷达,其波长越短。波长越短,意味着分辨率越高;而分辨率越高,意味着在距离、速度、角度上的测量精度更高。因此79GHz的毫米波雷达必然是未来的发展趋势。
毫米波雷达相比于激光有更强的穿透性,能够轻松地穿透保险杠上的塑料,因此常被安装在汽车的保险杠内。这也是为什么很多具备ACC(自适应巡航)的车上明明有毫米波雷达,却很难从外观上发现它们的原因。
毫米波雷达的数据
由于毫米波的测距和测速原理都是基于多普勒效应,因此与激光的笛卡尔(XYZ)坐标系不同,毫米波雷达的原始数据是基于(距离+角度)极坐标系。当然,两种坐标系可以根据三角函数相互转换。
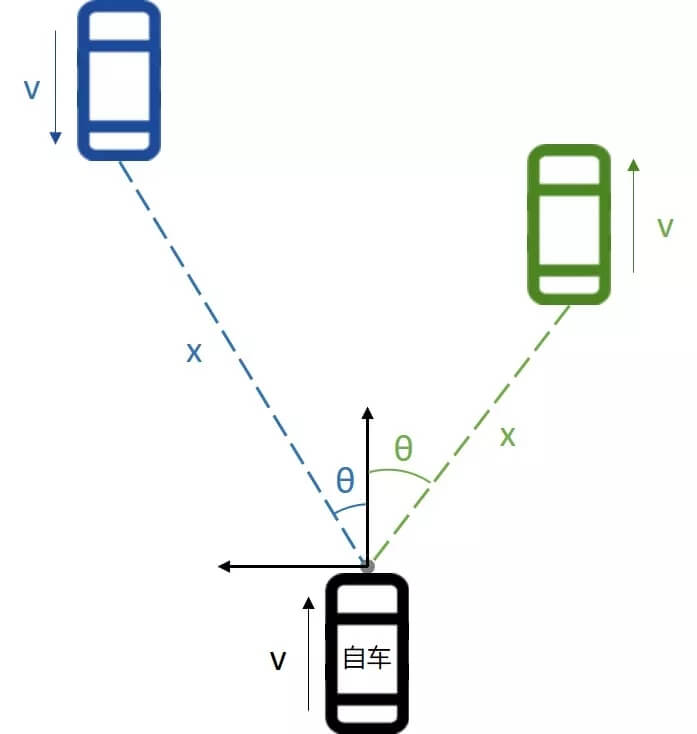
如下图所示,安装有毫米波雷达的自车前方有迎面驶来的蓝色小车和同向行驶的绿色小车。
毫米波雷达发射的电磁会穿透汽车的前后保险杠,但是无法穿透汽车底盘的金属,因此在遇到金属这类毫米波雷达无法穿透的物体时,电磁波就会返回。
以德尔福的前向毫米波雷达ESR为例,该雷达每帧最多能够返回64个目标的数据,每个目标的数据组成如下:
回波强度,单位为分贝。不同类型的障碍物(汽车、铁护栏、摩托车等)在不同距离下的回波强度也会有所变化,如果回波强度太低可以认定该信号为噪声。
所检测到的障碍物是否为桥。城市道路中会遇到立交桥的场景,从ESR中获取的该信号,可以用于判断所检测到的障碍物是否为桥。
障碍物是否在靠近的标志位。该标志位多用于主动安全的AEB(自动紧急刹车)中。
障碍物的“身份证”。每个障碍物都会有一个固定的ID,ID范围是0~63。
障碍物的跟踪状态。
障碍物与毫米波雷达所成的夹角。示意图中的θ角,就是这里的值。由于每个雷达都有极限探测范围,以ESR为例,图中θ的范围在-45°和45°之间。
障碍物距离毫米波雷达的距离。该距离是极坐标系下的距离,也就是示意图中的x。根据x和θ,即可计算出自车笛卡尔(XYZ)坐标系下的坐标。
障碍物与自车的径向相对速度。由于多普勒效应的原理,雷达的测量中只能提供极坐标系下的径向速度,切向速度的测量置信度很低,因此雷达并不会提供障碍物的切向速度。
障碍物与自车的径向相对加速度。该值是通过对径向相对速度做微分得到的。
障碍物的运动状态。根据该值可以判断障碍物时静止的还是运动的。
障碍物的宽度。将原始的雷达数据点通过聚类后,会得到一个区域,该区域的范围即认为是障碍物的宽度。
更多信息可参考链接:https://github.com/ApolloAuto/apollo/blob/mobileye_radar/modules/drivers/proto/delphi_esr.proto
目前国际上主流的毫米波雷达供应商有四家,分别是Autoliv(奥托立夫)、Bosch(博世)、Continental(大陆)、Delphi(德尔福),业界简称ABCD。各家的毫米波雷达的产品提供的功能大同小异,大部分功能都是通过障碍物的回波能量、距离、角度信息推算而来的。
毫米波雷达的挑战
在谈论挑战之前,先直观地感受一下激光雷达的数据吧。该视频是在某段高速公路上采集的毫米波雷达数据。
没有流量的直接看图。图左为毫米波雷达检测障碍物的位置信息;图右是实际的道路场景。
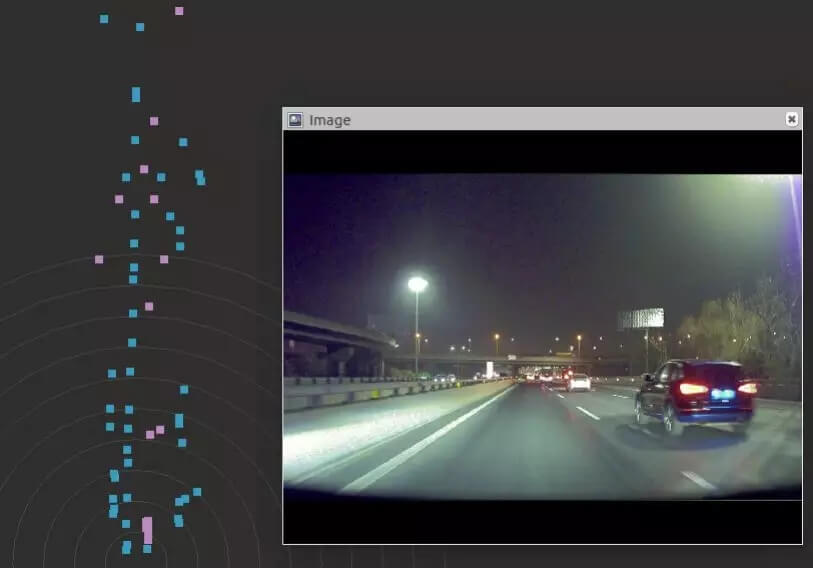
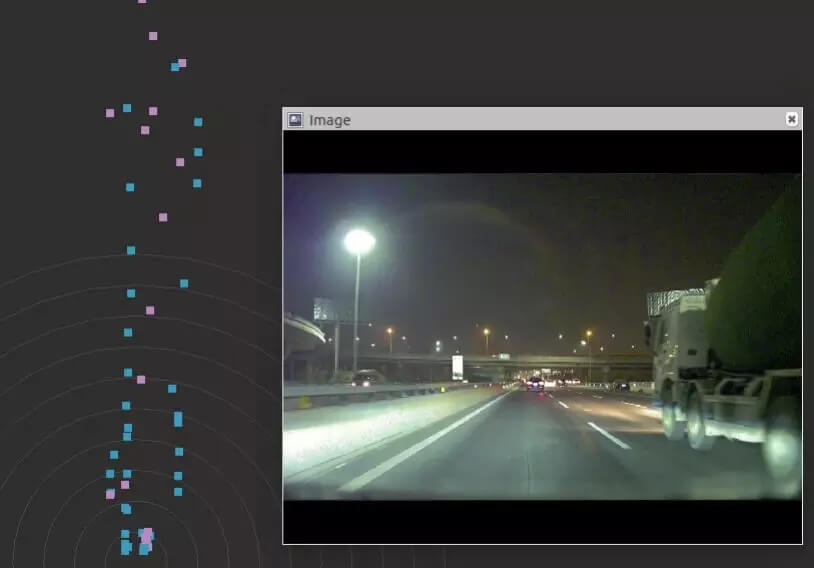
图中灰色圆圈的中心为雷达的安装位置,蓝色的点为静止的障碍物,粉红色的点移动的障碍物。
可以很清晰地看到蓝色的点组成了一条直线,这条直线其实就是铁护栏。但是如何让计算机知道这么多点里面有这么一条护栏呢?这就是算法工程师每天要做的事情啦。
实际开发的过程中,在自动驾驶领域应用毫米波雷达有一下三点挑战。
挑战1:数据稳定性差
很明显…看到这样(乱且不稳定)的数据,工程师也表示很绝望。数据的不稳定性对后续的软件算法提出了较高的要求。
挑战2:对金属敏感
由于毫米波雷达发出的电磁波对金属极为敏感,在实际测试过程中会发现近处路面上突然出现的钉子、远距离外的金属广告牌都会被认为是障碍物。一旦车辆高速行驶,被这些突然跳出的障碍物干扰时,会导致刹车不断,导致汽车的舒适性下降。
挑战3:高度信息缺失
毫米波雷达的数据只能提供距离和角度信息,不能像激光雷达那样提供高度信息。没有高度信息的障碍物点会给技术开发带来很多挑战。
小结
上面的分享基本上能让大家了解毫米波雷达的原理和数据长什么样。再结合前几期分享中介绍的激光雷达和摄像机的特性,会发现,不同的传感器都有其优势和缺陷。如何融合这些传感器的优势,弥补不足就是我现在的主要工作啦。

 友情链接
友情链接