








公众号/新智驾
新智驾按:激光雷达目前已经成为了自动驾驶的关键传感器之一,市面上也出现了多种产品选择,但关于激光雷达,一直流传着一些说法,但非专业人士对这些说法一时难以辨别,本文梳理了11个关于激光雷达的“谣言”,将带读者一探究竟。
本文作者裴军,硅谷激光雷达公司 Cepton 创始人兼 CEO。雷锋网新智驾获经授权转载。
1. 激光雷达是一种非常高科技的设备
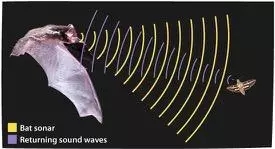
*蝙蝠的声波演示
激光雷达是在20世纪60年代早期脉冲激光被发明出来之后不久发明的,原理其实非常简单,就像蝙蝠根据从物体反射回来的声波来测量与物体的距离一样,激光雷达只是将声波换成了光波。
激光雷达所做的,是发射出一段脉冲并测量它从物体反射回来的时间。由于光速是恒定的,因此很容易就可以通过测量光波的飞行时间来计算距离。
这一物理学基础在过去的半个世纪中都没有改变,因此激光雷达的工作原理仍然是相当简单的。
2. 激光雷达价格高昂
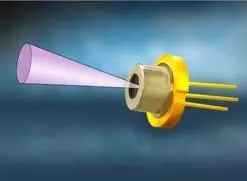
*可见脉冲激光二极管
虽然在很长一段时间内,由于激光源高昂的价格,激光雷达的价格的确一直居高不下,但激光二极管的发明大大降低了激光雷达的成本。
如今,花费不超过1美元就可以买到一个可见脉冲激光二极管,激光源的价格不再是影响激光雷达价格的主要因素。对于能够进行多点测量的成像激光雷达来说,增加的成本通常与其成像方法有关。
采用Cepton 微动技术(MMT)的创新方法制造出的成像激光雷达,其价格不会超过普相机的价格。
3.固态激光雷达没有运动的部件,是最好的方法
没有运动部件的固态激光雷达只改进了激光结构的一个方面。无磨损的结构增强了激光雷达的可靠性。然而,无磨损的机构,也会使得激光雷达性能大打折扣。
最能够说明问题的表现就是激光雷达的测量距离减小,视场角缩小,或者对环境光源(如阳光)更敏感。
此外,固态激光雷达的高成本也成为了阻碍其在消费者市场大规模部署的因素。
4. Flash激光雷达是最好的成像激光雷达

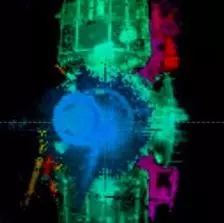
*美国国家航空航天局的Flash激光雷达成像
美国国家航空航天局在进行空间站对接操作时使用了Flash激光雷达。其使用的激光雷达有较高的分辨率和较长的检测距离。
然而,为实现所需的性能,激光雷达所使用的波长(1550nm)和所需的功率(~100千瓦的峰值功率) 导致其成本远远超过一百万美元。
虽然Flash激光雷达的成像性能确实是最好的,但是一般的汽车都用不上耗资一百万的传感器。
5. 1550激光对人眼来说才是安全的,905不是
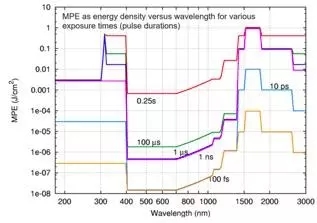
*波长示意图
人眼安全受到许多因素的影响,而不仅仅是波长。除波长外,安全等级还取决于功率,发散角,脉冲持续时间,曝光方向等因素。
在类似的其他条件下,在安全的范围内,1550nm激光的功率要比905nm激光的高。然而,工程师们倾向于设计灵敏的光学检测器,这种检测器不需要高功率激光器。相比高成本的1550nm激光光源,基于硅工艺的905nm激光更加合适,特别是在对成本高度敏感的汽车市场。
6. 激光雷达无法在不良的天气条件下工作

*机场恶劣的天气条件
实际上,激光雷达和相机一样,都是光学设备。如果出现大雾阻挡了一切光的传输,那么激光雷达的确会失效。然而,为了量化这种影响,航空业已经明确地定义了“能见度”这一物理量,即在不明亮的背景下,可以看到和识别光强为1000坎德拉的光源的最大距离。
根据目视飞行规则的着陆限制,当能见度大于1800英尺,激光雷达的性能是不会受到影响的。
7. 激光雷达仅适用于汽车


*阿波罗11号使用激光第一次精确地测量到了地球和月球之间的距离
激光雷达是近些年才开始用于汽车的。
在半个世纪前激光雷达刚被发明出来时,其最为人熟知的应用是测量地球和月球之间的距离。后来,激光雷达被用于测量地面与云的距离和其他天气条件。
如今,激光雷达可用于任何需要测量物体距离的应用中。随着激光雷达成本的下降,激光雷达将会用于诸如交叉路口、安防和其他基础设施中。
8. Cepton的微动技术与MEMS相同
*Cepton Vista 车用激光雷达
Cepton发明的微动技术(MMT)利用无摩擦的电磁驱动运动来进行光学扫描。这一设计与MEMS是不相同的,MEMS主要利用振镜来进行光束扫描。
Cepton激光雷达的光程中没有涉及到任何振镜,简化结构的同时,还将光能损失保持在最低水平。
9. 激光雷达必须采用红外光
只要是可以产生短脉冲的光波,激光雷达就可以采用。
实际上,勘测用激光雷达就时常采用绿色激光。对于汽车应用,任何可见激光都会导致驾驶员分心,因此通常选用人肉眼看不到的红外光。适当的滤波还可以提高激光雷达在环境光下的性能,例如在汽车前照灯的光照下。
10. FMCW激光雷达比TOF雷达要好
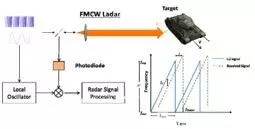
FMCW(调频连续波)激光雷达测量的是光波的相位差而不是飞行时间,因此它具有更高的测量精度(从毫米到微米)。如此高的精确度对于勘测应用来说是有必要的,但汽车在进行障碍物检测时,并不需要这种精确度,厘米级的精度就够了。
FMCW激光雷达十分复杂,成本高昂,即使是对L4到L5的自动驾驶应用也没什么吸引力。
11. 用摄像头、雷达或两者的组合就可以取代激光雷达
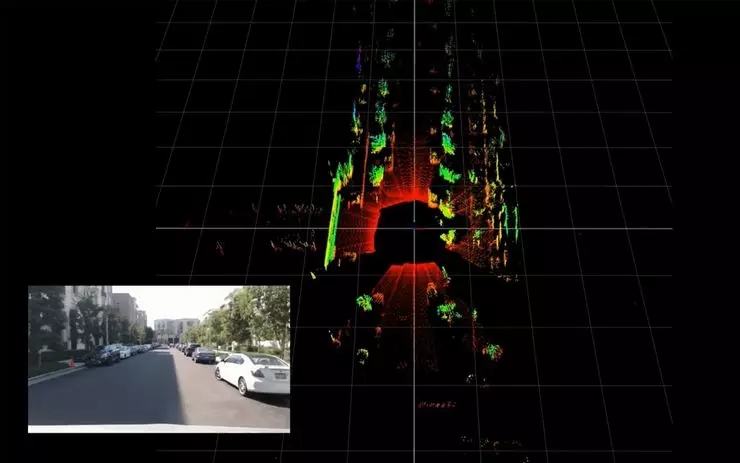
*L3以上的未来交通
激光雷达最突出的特点是在测量三维物体时也有较高空间分辨率。雷达可以检测到停在前方的汽车,但无法判断该车是停在前方还是侧方。在没有足够环境照明的情况下,摄像头也将变得毫无用处。
实际上,激光雷达、雷达和摄像头有望共同配备在L3及以上的自动驾驶车辆中。

 友情链接
友情链接